拉菲羅安德烈 (Raffaello D’Andrea) 展示了他與他的團隊開發的四軸飛行器,它的飛行與運動控制能力幾乎跟運動員一樣,身手矯健,可以說是讓人嘆為觀止。
在這場簡短的演講中,拉菲羅安德烈展示了機器運動能力的概念,以及他們所進行的相關研究,他們所使用的這一種飛行器稱為四軸飛行器(quadcopters),這種飛行器其實已經存在很久了,而他很受歡迎的原因在於他的機械結構很簡單,只要控制四的螺旋槳的速度,就可以讓種種飛行器進行側滾、俯仰、偏擺與沿著他門共同的方向加速。這台飛行器上除了這些螺旋槳之外,還有裝載電腦、電池、各種感應器與無線收發器。
基本上四軸飛行器非常靈活,也不容易控制,需要一些技巧與自動回餽的機制才能完美的操控它,在這個演講的場所中,他們已經預先在天花板上裝設了攝影機,配合筆記型電腦組成一個室內的定位系統,而在飛行器上面就裝設一個會反光的物體作為標記,透過這樣的機制就可以在空間中定位飛行器的位置。當電腦可以抓到飛行器的位置之後,就可以進行一些估計與控制的演算法,計算完成之後就把資訊傳送到飛行器上面,而飛行器本身也會執行一些簡單的演算法計算,藉此控制整個飛行過程。
這中間的研究最主要的部分就是演算法的設計,到底要怎麼設計演算法才能創造出機器運動員呢?他們所使用的方法屬於以模型為基礎的設計(model-based design),首先建立物理運動的數學模型,然後使用控制理論(control theory,數學上的一個分支)來分析這個模型,並解結合演算法來控制這台飛行器,例如如果我們想讓這台飛行器停在空中,我們會先使用微分方程式(differential equations)來捕捉這個動態的物理現象,然後再使用控制理論來幫助我們建立演算法以達到讓飛行器可以穩定停留的目的。
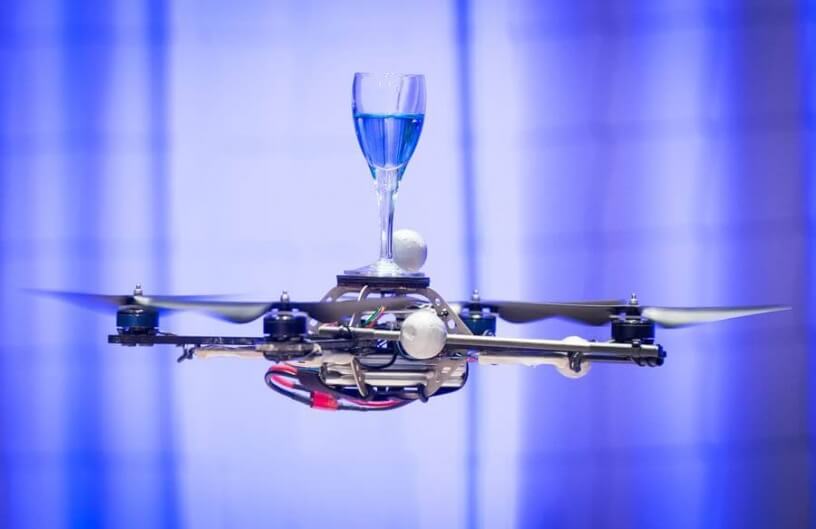
這個飛行器除了自己做一些高難度的動作(像是讓桿子保持平衡與載一杯水)之外,好幾台飛行器還可以協同運作,像是三台飛行器共同張開一張網子接住拉菲羅丟出去的球,然後在共同拉開網子把球丟回去,非常厲害。
參考資料:TED