Tensorflow Object Detection API 提供了許多種不同的模型,每個模型各有優缺點,Speed 是辨識的速度,而 COCO mAP 則代表準確度,入門範例中使用的 ssd_mobilenet_v1_coco 模型是速度最快的,但是準確度也是最差的,這種模型適合用在即時(real time)的應用。如果比較在意準確度而不在意速度的話,就可以考慮其它模型。
在這個範例中,我們可以透過 MODEL_NAME 來指定模型,這裡示範換成準確度比較高的 Faster RCNN + NAS(Neural Architecture Search)模型:
# 使用 Faster RCNN + NAS 模型 MODEL_NAME = 'faster_rcnn_nas_coco_2017_11_08' MODEL_FILE = MODEL_NAME + '.tar.gz' DOWNLOAD_BASE = 'http://download.tensorflow.org/models/object_detection/'
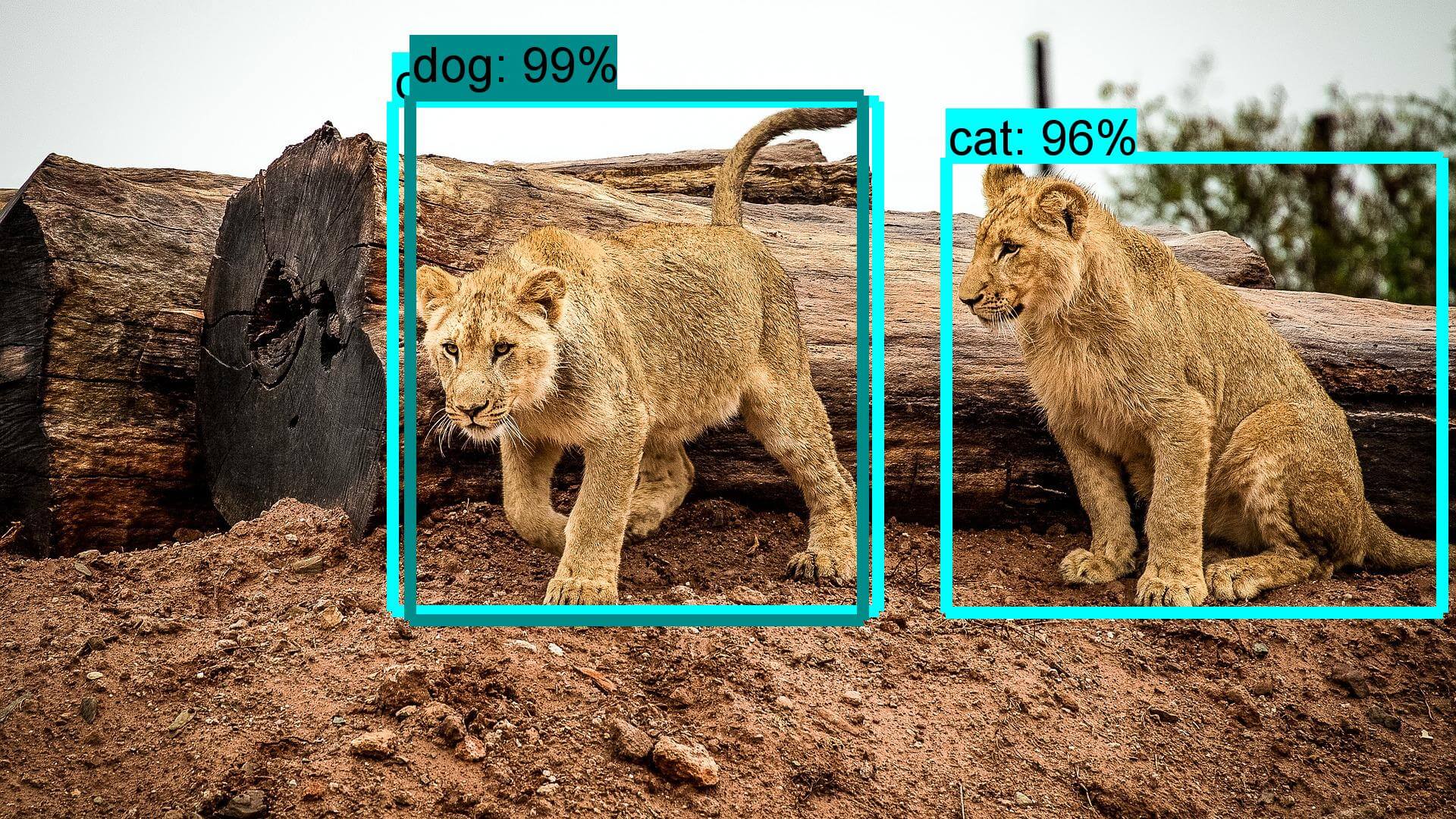
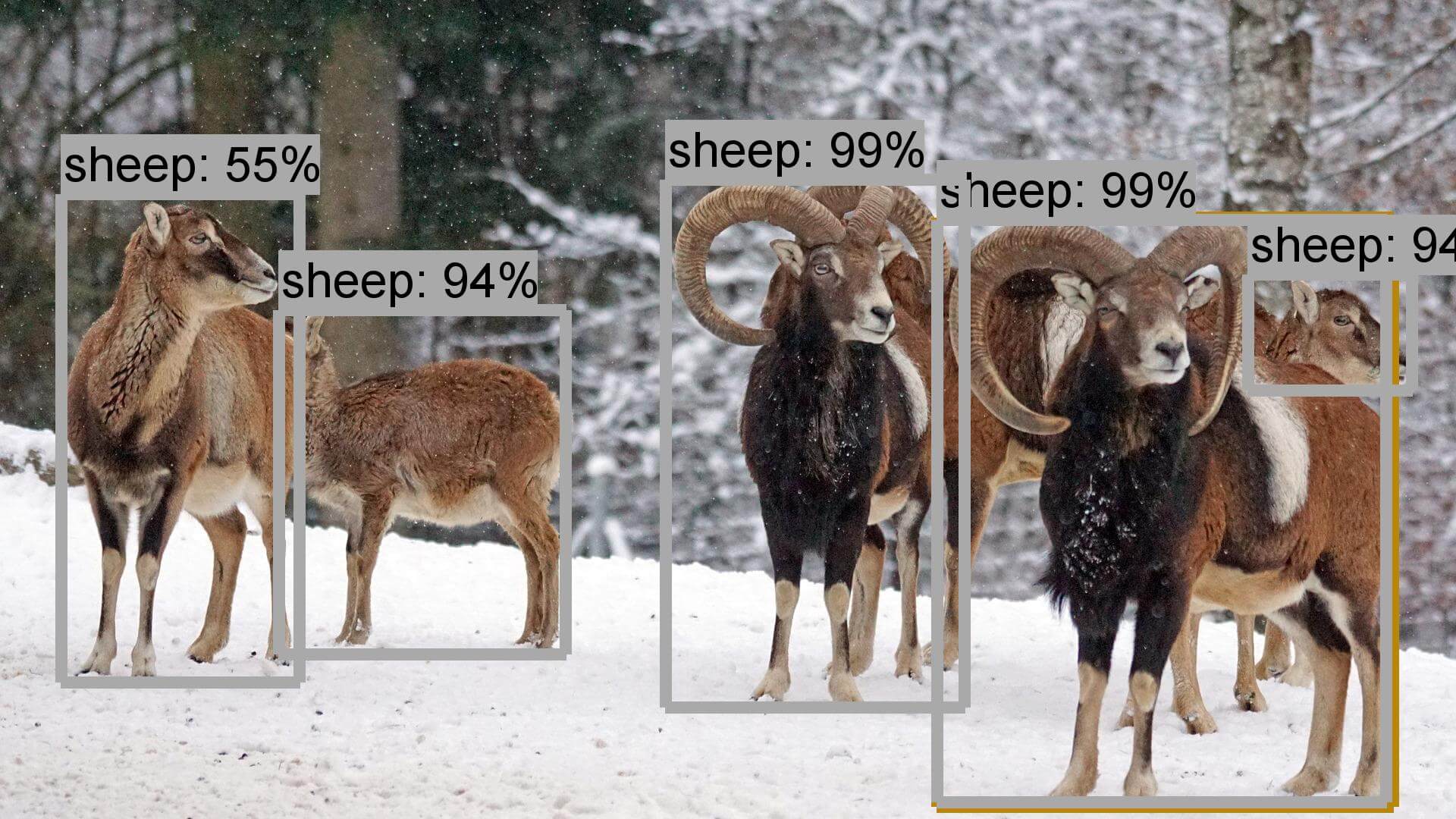
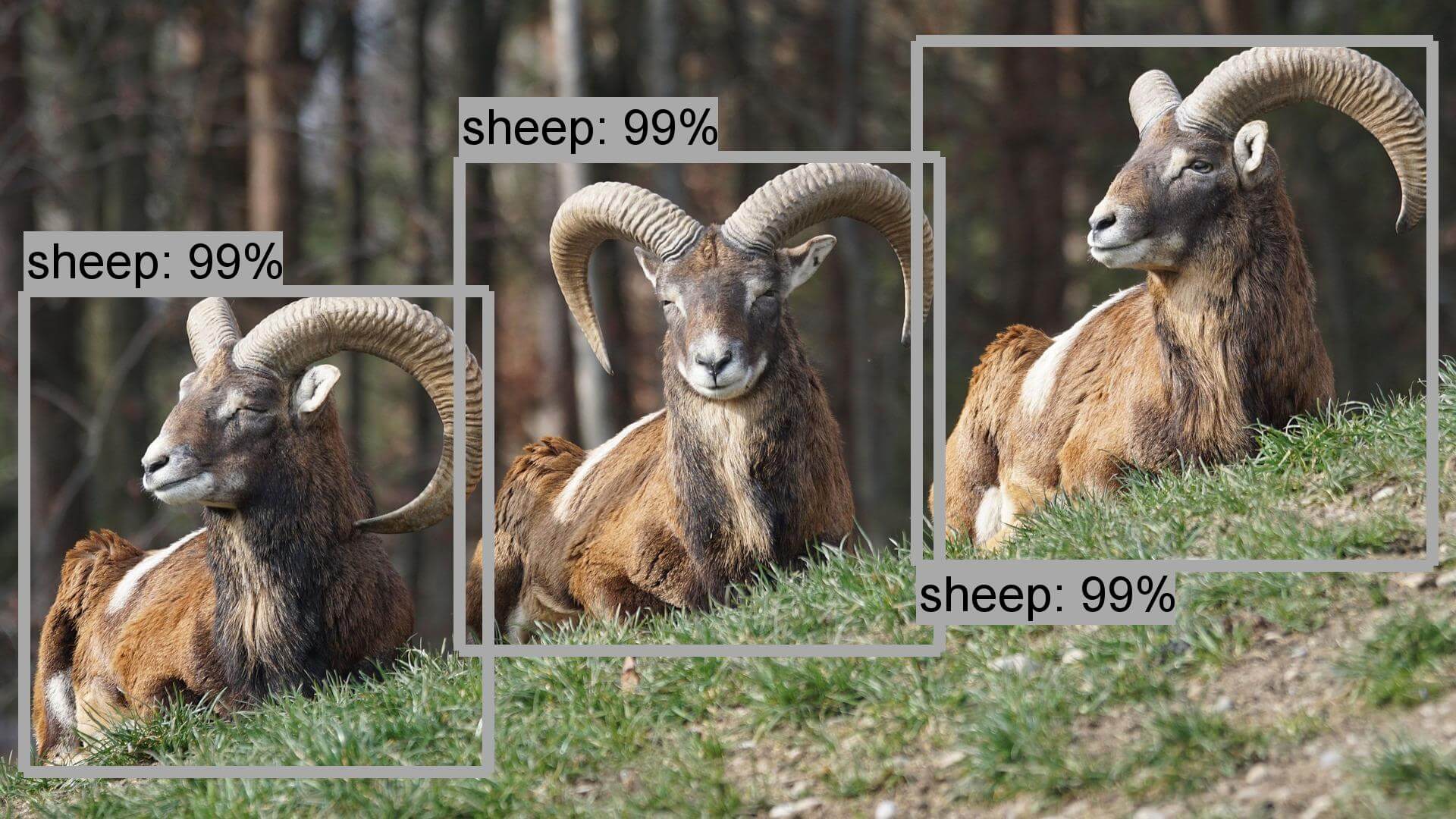
以下是用 Faster RCNN + NAS 模型所跑出來的結果:
換成 Faster RCNN + NAS 模型之後,大部分的結果都很不錯,只差小獅子會被誤判成貓與狗,不過感覺起來準確度是可以接受的。
以上的應用都是拿靜態的圖片進行物件辨識,接下來我們要示範如何從影片或即時的網路攝影機取得影像,靠著 Tensorflow Object Detection API 辨識出串流影片中的物件,並產生有物件標註的影片檔。
首先將上面的範例儲存成一般的 Python 指令稿,然後參考 OpenCV 擷取網路攝影機串流影像的技巧,將這個範例中的輸入影像替換為攝影機的影像,讓每個串流影格經過 Tensorflow Object Detection API 物件辨識處理後,再即時顯示在 OpenCV 的視窗中。
完整個範例程式碼如下:
import numpy as np import os import six.moves.urllib as urllib import sys import tarfile import tensorflow as tf import zipfile import scipy.misc # 加入 OpenCV 模組 import cv2 from collections import defaultdict from io import StringIO from matplotlib import pyplot as plt from PIL import Image if tf.__version__ != '1.4.0': raise ImportError('Please upgrade your tensorflow installation to v1.4.0!') # 建立 VideoCapture 物件 cap = cv2.VideoCapture(1) # 設定擷取的畫面解析度 cap.set(cv2.CAP_PROP_FRAME_WIDTH, 960) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480) sys.path.append("..") from utils import label_map_util from utils import visualization_utils as vis_util MODEL_NAME = 'ssd_mobilenet_v1_coco_2017_11_17' MODEL_FILE = MODEL_NAME + '.tar.gz' DOWNLOAD_BASE = 'http://download.tensorflow.org/models/object_detection/' PATH_TO_CKPT = MODEL_NAME + '/frozen_inference_graph.pb' PATH_TO_LABELS = os.path.join('data', 'mscoco_label_map.pbtxt') NUM_CLASSES = 90 opener = urllib.request.URLopener() opener.retrieve(DOWNLOAD_BASE + MODEL_FILE, MODEL_FILE) tar_file = tarfile.open(MODEL_FILE) for file in tar_file.getmembers(): file_name = os.path.basename(file.name) if 'frozen_inference_graph.pb' in file_name: tar_file.extract(file, os.getcwd()) detection_graph = tf.Graph() with detection_graph.as_default(): od_graph_def = tf.GraphDef() with tf.gfile.GFile(PATH_TO_CKPT, 'rb') as fid: serialized_graph = fid.read() od_graph_def.ParseFromString(serialized_graph) tf.import_graph_def(od_graph_def, name='') label_map = label_map_util.load_labelmap(PATH_TO_LABELS) categories = label_map_util.convert_label_map_to_categories(label_map, max_num_classes=NUM_CLASSES, use_display_name=True) category_index = label_map_util.create_category_index(categories) def load_image_into_numpy_array(image): (im_width, im_height) = image.size return np.array(image.getdata()).reshape( (im_height, im_width, 3)).astype(np.uint8) with detection_graph.as_default(): with tf.Session(graph=detection_graph) as sess: # 使用無窮迴圈,持續擷取網路攝影機影像 while True: # 讀取一個影格 ret, image_np = cap.read() image_tensor = detection_graph.get_tensor_by_name('image_tensor:0') detection_boxes = detection_graph.get_tensor_by_name('detection_boxes:0') detection_scores = detection_graph.get_tensor_by_name('detection_scores:0') detection_classes = detection_graph.get_tensor_by_name('detection_classes:0') num_detections = detection_graph.get_tensor_by_name('num_detections:0') image_np_expanded = np.expand_dims(image_np, axis=0) (boxes, scores, classes, num) = sess.run( [detection_boxes, detection_scores, detection_classes, num_detections], feed_dict={image_tensor: image_np_expanded}) vis_util.visualize_boxes_and_labels_on_image_array( image_np, np.squeeze(boxes), np.squeeze(classes).astype(np.int32), np.squeeze(scores), category_index, use_normalized_coordinates=True, line_thickness=4) # 以 OpenCV 視窗即時顯示辨識結果 cv2.imshow('object detection', image_np) if cv2.waitKey(25) & 0xFF == ord('q'): cv2.destroyAllWindows() break
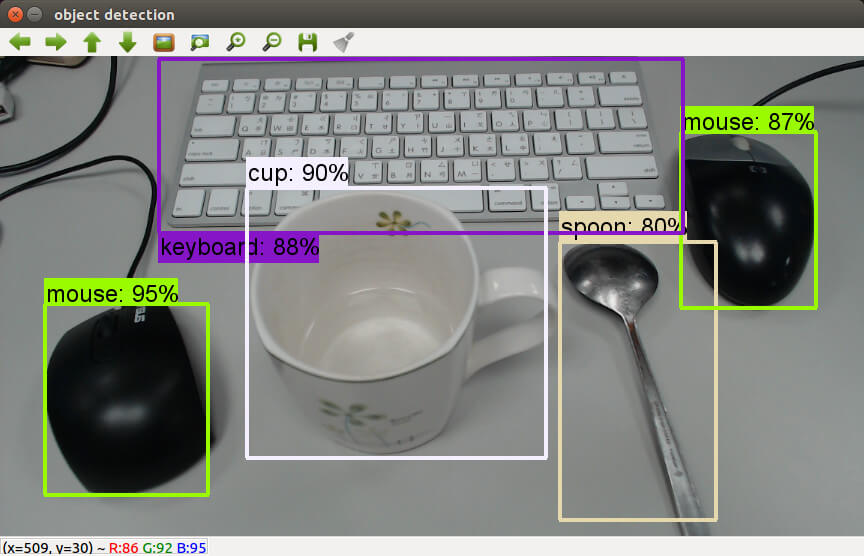
執行之後,就可以從網路攝影機擷取串流的影像,即時產生辨識的結果。
這是我將每個影格辨識的結果輸出成影片的樣子。
在這種即時性的應用,就比較適合使用 SSD + Mobilenet 這類運算比較快的模型,若使用 Faster RCNN + NAS 這種比較慢的模型,每個畫面運算就要等比較久。
除了即時擷取網路攝影機的影像之外,也可以從影片檔案讀取畫面來進行物件辨識,我拿之前用樹莓派拍攝的縮時攝影來測試,以下是測試結果:
Page: 1 2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}