介紹如何使用 ITK 的 observer 監看影像對準過程,繪製及時的距離變化圖,確認收斂情況。
影像對準(image registration)的計算過程需要確認結果是否正確收斂到最佳解,在 ITK 中我們可以透過設定 observer 的方式,取出每次疊代產生的 metric 數值,並及時繪製出圖形,方便開發者調整參數。
以下幾個回呼函數(callback function)可用來繪製即時的 metric 數值收斂狀況。
from IPython.display import clear_output
# 初始事件回呼函數
def cb_registration_start():
global cb_metric_values
global cb_current_iteration_number
cb_metric_values = []
cb_current_iteration_number = -1
# 結束事件回呼函數
def cb_registration_end():
global cb_metric_values
global cb_current_iteration_number
del cb_metric_values
del cb_current_iteration_number
plt.close()
# 疊代事件回呼函數
def cb_registration_iteration():
global cb_metric_values
global cb_current_iteration_number
# 忽略重覆產生的疊代事件
if optimizer.GetCurrentIteration() == cb_current_iteration_number:
return
cb_current_iteration_number = optimizer.GetCurrentIteration()
cb_metric_values.append(optimizer.GetValue())
# 清空輸出
clear_output(wait=True)
# 繪製 Metric 圖形
plt.plot(cb_metric_values)
plt.xlabel('Iteration Number', fontsize=12)
plt.ylabel('Metric Value', fontsize=12)
plt.show()
定義好這些回呼函數之後,接著在 optimizer 上面加上 sbserver,設定事件與回呼函數的對應關係:
# 加上 Observer,設定事件與回呼函數的對應關係
optimizer.AddObserver(itk.StartEvent(), cb_registration_start)
optimizer.AddObserver(itk.EndEvent(), cb_registration_end)
optimizer.AddObserver(itk.IterationEvent(), cb_registration_iteration)
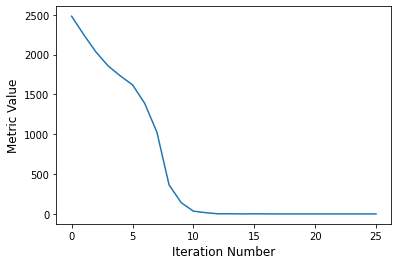
這樣在執行影像對準的時候,就會及時繪製出 metric 數值收斂的狀況了。
這裡我們將這些 observer 套用在影像平移線性對準的範例中,可得到向這樣的 metric 收斂圖形。