介紹如何使用 VersorRigid3DTransform 剛性影像轉換搭配 CenteredTransformInitializer 置中初始化對影像進行對準。
影像對準
首先定義各種資料與物件的型別。
import itk
import matplotlib.pyplot as plt
# 定義資料型別
FixedImageType = itk.Image[itk.F, 3]
MovingImageType = itk.Image[itk.F, 3]
TransformType = itk.VersorRigid3DTransform[itk.D]
OptimizerType = itk.RegularStepGradientDescentOptimizerv4[itk.D]
RegistrationType = itk.ImageRegistrationMethodv4[FixedImageType,
MovingImageType]
MetricType = itk.MeanSquaresImageToImageMetricv4[FixedImageType,
MovingImageType]
建立影像 reader,並指定影像來源檔案:
# 建立影像 Reader
fixedImageReader = itk.ImageFileReader[FixedImageType].New()
movingImageReader = itk.ImageFileReader[MovingImageType].New()
# 指定影像來源檔案
fixedImageReader.SetFileName("brainweb1e1a10f20.mha")
movingImageReader.SetFileName("brainweb1e1a10f20Rot10Tx15.mha")
這裡所使用的原始影像可以從 Kitware Data 的網站上取得。
建立 registration、optimizer、metric 物件:
# 建立 Registration
registration = RegistrationType.New()
# 指定 Registration 的影像來源
registration.SetFixedImage(fixedImageReader.GetOutput())
registration.SetMovingImage(movingImageReader.GetOutput())
# 設定 Optimizer
optimizer = OptimizerType.New()
registration.SetOptimizer(optimizer)
# 設定 Metric
metric = MetricType.New()
registration.SetMetric(metric)
建立並設定初始轉換:
# 建立並設定初始轉換
initialTransform = TransformType.New()
# 使用 CenteredTransformInitializer 初始化影像位置
TransformInitializerType = itk.CenteredTransformInitializer[
TransformType, FixedImageType, MovingImageType];
transformInitializer = TransformInitializerType.New()
transformInitializer.SetTransform(initialTransform)
transformInitializer.SetFixedImage(fixedImageReader.GetOutput())
transformInitializer.SetMovingImage(movingImageReader.GetOutput())
transformInitializer.MomentsOn()
transformInitializer.InitializeTransform()
# 自行指定影像初始旋轉角度
axis = [0, 0, 1]
angle = 0.05 # 弧度(radian),0 ~ 2*pi
rotation = initialTransform.GetVersor()
# rotation.SetIdentity()
# rotation.SetRotationAroundX(angle)
rotation.Set(axis, angle)
initialTransform.SetRotation(rotation)
# 設定初始轉換
registration.SetInitialTransform(initialTransform)
這裡我們將所有的轉換都放在同一個 initialTransform 初始轉換中,不再另外個別設定 fixed 與 moving 影像的初始轉換。
設定各參數尺度,旋轉的單位是弧度(radian),平移的單位就要看影像的 voxel size 而定:
# 設定各參數尺度
numOfParam = initialTransform.GetNumberOfParameters()
optimizerScales = itk.OptimizerParameters.D(numOfParam)
translationScale = 1.0 / 1000.0
optimizerScales.SetElement(, 1.0) # 旋轉
optimizerScales.SetElement(1, 1.0) # 旋轉
optimizerScales.SetElement(2, 1.0) # 旋轉
optimizerScales.SetElement(3, translationScale) # X 軸平移
optimizerScales.SetElement(4, translationScale) # Y 軸平移
optimizerScales.SetElement(5, translationScale) # Z 軸平移
optimizer.SetScales(optimizerScales)
設定其他的參數:
# 設定疊代次數上限
optimizer.SetNumberOfIterations(200)
# 設定 Learning Rate
optimizer.SetLearningRate(0.2)
# 設定最小步長
optimizer.SetMinimumStepLength(0.001)
# 紀錄並傳回最佳解
optimizer.SetReturnBestParametersAndValue(True)
設定回呼函數:
from IPython.display import clear_output
# 初始事件回呼函數
def cb_registration_start():
global cb_metric_values
global cb_current_iteration_number
cb_metric_values = []
cb_current_iteration_number = -1
# 結束事件回呼函數
def cb_registration_end():
global cb_metric_values
global cb_current_iteration_number
del cb_metric_values
del cb_current_iteration_number
plt.close()
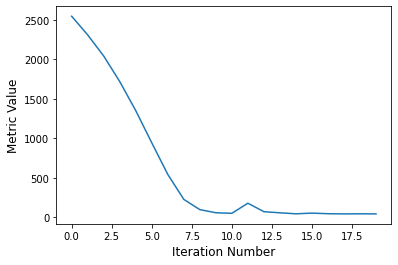
# 疊代事件回呼函數
def cb_registration_iteration():
global cb_metric_values
global cb_current_iteration_number
# 忽略重覆產生的疊代事件
if optimizer.GetCurrentIteration() == cb_current_iteration_number:
return
cb_current_iteration_number = optimizer.GetCurrentIteration()
cb_metric_values.append(optimizer.GetValue())
# 清空輸出
clear_output(wait=True)
# 繪製 Metric 圖形
plt.plot(cb_metric_values)
plt.xlabel('Iteration Number', fontsize=12)
plt.ylabel('Metric Value', fontsize=12)
plt.show()
# 加上 Observer,設定事件與回呼函數的對應關係
optimizer.AddObserver(itk.StartEvent(), cb_registration_start)
optimizer.AddObserver(itk.EndEvent(), cb_registration_end)
optimizer.AddObserver(itk.IterationEvent(), cb_registration_iteration)
設定 levels 相關參數:
# 設定 Levels 相關參數
registration.SetNumberOfLevels(1)
registration.SetSmoothingSigmasPerLevel([0])
registration.SetShrinkFactorsPerLevel([1])
進行影像對準,並取得影像對準結果:
# 進行影像對準
registration.Update()
# 取得影像對準結果
transform = registration.GetTransform()
finalParameters = transform.GetParameters()
versorX = finalParameters[0]
versorY = finalParameters[1]
versorZ = finalParameters[2]
finalTranslationX = finalParameters[3]
finalTranslationY = finalParameters[4]
finalTranslationZ = finalParameters[5]
numberOfIterations = optimizer.GetCurrentIteration()
bestMetricValue = optimizer.GetValue()
print("Registration result: ")
print(" versor X = " + str(versorX))
print(" versor Y = " + str(versorY))
print(" versor Z = " + str(versorZ))
print(" Translation X = " + str(finalTranslationX))
print(" Translation Y = " + str(finalTranslationY))
print(" Translation Z = " + str(finalTranslationZ))
print(" Iterations = " + str(numberOfIterations))
print(" Metric value = " + str(bestMetricValue))
Registration result: versor X = -0.0004894967032320457 versor Y = 4.237733030565726e-05 versor Z = -0.08724172378868676 Translation X = 2.647231867780532 Translation Y = -17.466151639587682 Translation Z = -0.0026474097082672884 Iterations = 21 Metric value = 43.983994481735564
影像轉換
根據影像對準所得到的參數,建立一個轉換:
# 根據參數建立轉換
finalTransform = TransformType.New()
finalTransform.SetFixedParameters(registration.GetOutput().Get().GetFixedParameters())
finalTransform.SetParameters(finalParameters)
matrix = finalTransform.GetMatrix()
offset = finalTransform.GetOffset()
print("Matrix:\n", itk.GetArrayFromMatrix(matrix))
print("Offset:\n", offset)
Matrix: [[ 9.84777760e-01 1.73818110e-01 1.69840568e-04] [-1.73818193e-01 9.84777284e-01 9.67866412e-04] [ 9.77576960e-07 -9.82654697e-04 9.99999517e-01]] Offset: itkVectorD3 ([-15.0303, -0.0642312, 0.104991])
建立輸出對準結果用的 resampler,搭配轉換產生影像對準的結果:
# 建立輸出對準結果用的 Resampler
ResampleFilterType = itk.ResampleImageFilter[MovingImageType, FixedImageType]
resampler = ResampleFilterType.New()
resampler.SetInput(movingImageReader.GetOutput())
resampler.SetTransform(finalTransform)
resampler.SetUseReferenceImage(True)
resampler.SetReferenceImage(fixedImageReader.GetOutput())
resampler.SetDefaultPixelValue(100)
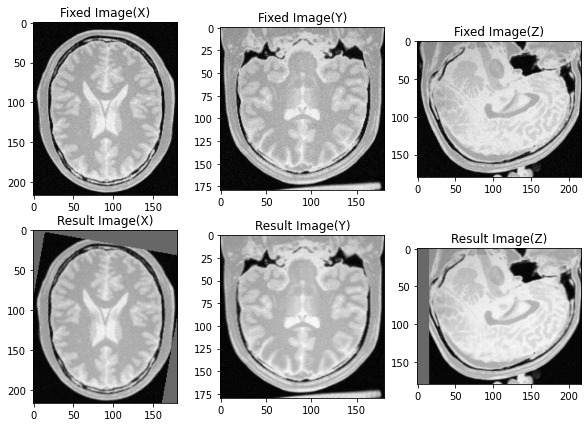
# 顯示各切面影像
fixedImageArray = itk.GetArrayViewFromImage(fixedImageReader.GetOutput())
resultImageArray = itk.GetArrayViewFromImage(resampler.GetOutput())
fig, axs = plt.subplots(2, 3, figsize=(10, 7))
axs[0,0].imshow(fixedImageArray[fixedImageArray.shape[0]//2,:,:], cmap='gray')
axs[0,0].set_title('Fixed Image(X)')
axs[0,1].imshow(fixedImageArray[:,fixedImageArray.shape[1]//2,:], cmap='gray')
axs[0,1].set_title('Fixed Image(Y)')
axs[0,2].imshow(fixedImageArray[:,:,fixedImageArray.shape[2]//2], cmap='gray')
axs[0,2].set_title('Fixed Image(Z)')
axs[1,0].imshow(resultImageArray[resultImageArray.shape[0]//2,:,:], cmap='gray')
axs[1,0].set_title('Result Image(X)')
axs[1,1].imshow(resultImageArray[:,resultImageArray.shape[1]//2,:], cmap='gray')
axs[1,1].set_title('Result Image(Y)')
axs[1,2].imshow(resultImageArray[:,:,resultImageArray.shape[2]//2], cmap='gray')
axs[1,2].set_title('Result Image(Z)')
plt.show()
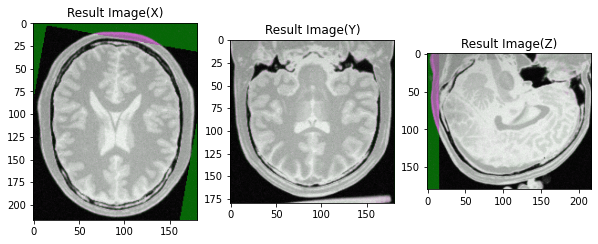
將 fixed 影像跟對準結果的影像合併為 RGB 影像:
# 轉換影像數值
OutputPixelType = itk.UC
OutputImageType = itk.Image[OutputPixelType, 3]
fixedIntensityRescaler = itk.RescaleIntensityImageFilter[FixedImageType, OutputImageType].New()
fixedIntensityRescaler.SetInput(fixedImageReader.GetOutput())
fixedIntensityRescaler.SetOutputMinimum(itk.NumericTraits[OutputPixelType].min())
fixedIntensityRescaler.SetOutputMaximum(itk.NumericTraits[OutputPixelType].max())
resultIntensityRescaler = itk.RescaleIntensityImageFilter[FixedImageType, OutputImageType].New()
resultIntensityRescaler.SetInput(resampler.GetOutput())
resultIntensityRescaler.SetOutputMinimum(itk.NumericTraits[OutputPixelType].min())
resultIntensityRescaler.SetOutputMaximum(itk.NumericTraits[OutputPixelType].max())
# 合併為 RGB 影像
ComponentType = itk.UC
RGBPixelType = itk.RGBPixel[ComponentType]
RGBImageType = itk.Image[RGBPixelType, 3]
composeFilter = itk.ComposeImageFilter[OutputImageType, RGBImageType].New()
composeFilter.SetInput(, fixedIntensityRescaler.GetOutput())
composeFilter.SetInput(1, resultIntensityRescaler.GetOutput())
composeFilter.SetInput(2, fixedIntensityRescaler.GetOutput())
# 顯示各切面影像
composeImageArray = itk.GetArrayViewFromImage(composeFilter.GetOutput())
fig, axs = plt.subplots(1, 3, figsize=(10, 5))
axs[0].imshow(composeImageArray[composeImageArray.shape[0]//2,:,:], cmap='gray')
axs[0].set_title('Result Image(X)')
axs[1].imshow(composeImageArray[:,composeImageArray.shape[1]//2,:], cmap='gray')
axs[1].set_title('Result Image(Y)')
axs[2].imshow(composeImageArray[:,:,composeImageArray.shape[2]//2], cmap='gray')
axs[2].set_title('Result Image(Z)')
plt.show()